MR9 机房巡检机器人是专门为数据中心机房、配电机房、设备机房等各类室内环境机房进行无人值守自动运维工作而开发定制的专业巡检机器人。MR9的云台摄像机自动升降范围可达0.6~2.0米,覆盖绝大多收的设备机柜高度。MR9巡检机器人搭载了高精度高灵敏度激光雷达,可以实现地图构建、实时定位和自主运动导航功能,自动行走到指定的位置, 无需对机房场地进行任何改动(例如安装轨道、粘贴引导定位标识等); MR9 机房巡检机器人可以搭载AI视觉分析算法,对机房里的服务器配电柜等设备的状态指示灯、数字显示仪表、指针显示仪表、开关位置状态显示等进行自动识别和记录,自行判断当前设备机器的运转是否正常。MR9搭载的声音频谱自动分析模块,可以检测设备工作时的噪声异常,并且可以根据用户提前设定的报警条件,当发现读数异常或指示灯颜色异常时立即给指定人员发送实时消息和现场图像视频;MR9配置有工业级红外热成像仪,可以无接触测量到当前机器设备的温度分布,若发现温度异常出现,同样会发送实时消息和现场图片给指定的管理人员;依靠自动跟随算法,MR9机房巡检机器人还可以工作在随工模式,对进入机房施工的人员进行全程监督录像。
MR9 机房巡检机器人的主要功能如下:
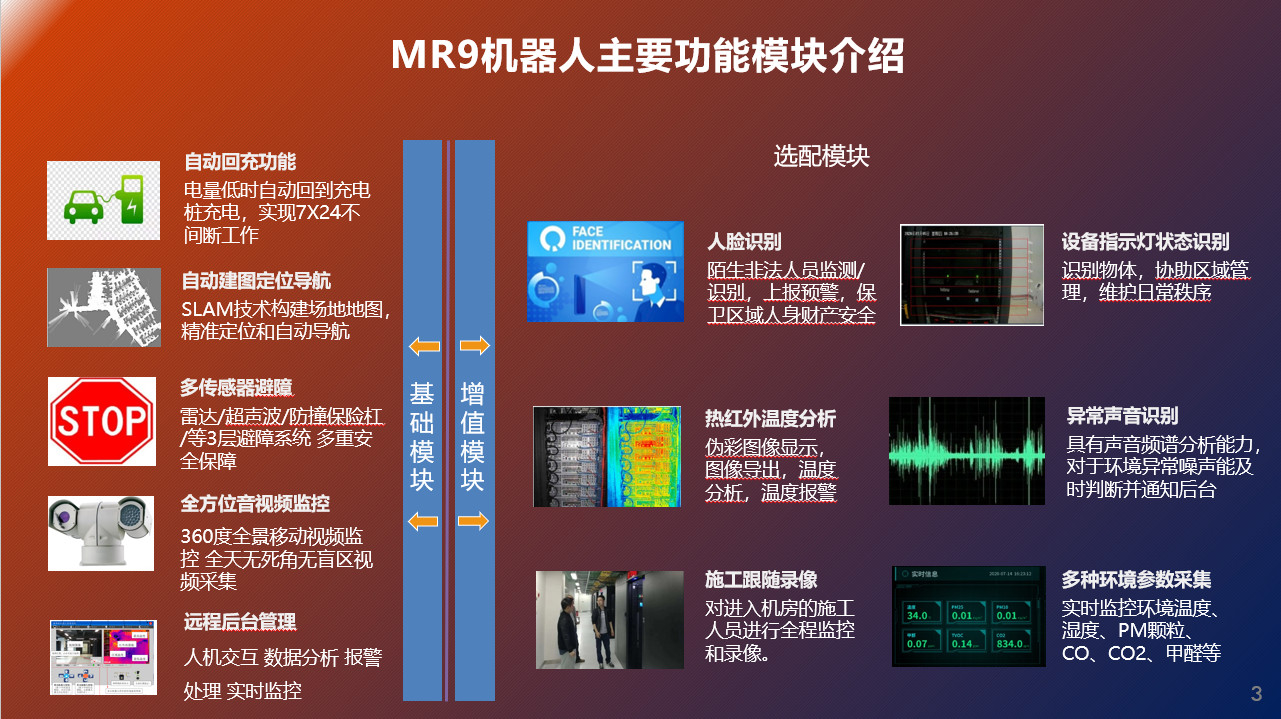
**环境参数检测:温度、湿度、噪声、烟雾、空气颗粒PM值等实时检测
**实时高清视频:实时3840*2160高清视频画面,黑光级夜视效果
**实时红外视频:工业级红外热图像视频画面,可测量温度场范围-20 ~ +450C°
**视觉智能分析:可选人脸识别、人体识别、状态灯识别、仪表状态识别等AI算法
**施工跟随录像:具有人体跟随功能,可以实现外来施工人员的全程跟随录像
**人机语音交互:支持语音唤醒,语音命令,基本的人机语音对话交流功能
**设备互联控制:机器人搭载有LORA无线遥控模块,可自动控制指定设备开关
**视频音频播放:可根据需要,对进入机房的人员播放视频和音频宣导
**声音频谱分析:通过声音频谱分析和升压分贝值分析,可以发现设备工作声音异常
**远程遥控行走:通过客户端UI可远程遥控机器人走到指定位置
**定时定点巡逻:可在客户端设定指定时间对指定机柜监控
**报警事件设置:可在客户端设定发现异常数据或事件的应急通知
**巡检日志设置:可自动生成EXCEL格式巡检报告
MR9 机房巡检机器人的主要技术参数如下:
|
基本巡检功能
|
自主定位导航/设备状态识别/远程视频监控/自主定时巡检/自动充电/巡检报告生成
|
|
推荐使用场所
|
IDC数据中心机房 企业服务器机房 计算机机房 大型配电机房等
|
|
结构尺寸和重量
|
高度在0.67~2.0米之间可自动升降,底盘大小53X45CM,重量40KG(含内置电池)
|
|
定位和导航方式
|
默认基于SLAM算法的自选路径导航方式, 特殊场地可以辅助部署UWB
|
|
运动底盘及驱动
|
双轮差速驱动,电机采用一体化2X200瓦轮毂电机,内置减速器,高效能低噪音
|
|
视频图像采集
|
采用4K高清像素ONVIF协议高清IPC黑光级摄像头,图像质量可达3840X2160像素
|
|
红外热图像采集
|
工业自动化领域专业红外热成像仪,测温度范围-20~450摄氏度
|
|
其他测量传感器
|
环境温度、湿度、烟雾、PM污染颗粒、CO2、噪声分贝、声音频谱
|
|
机器人硬件平台
|
主控板为PC工控机架构,CPU为酷睿I5处理器,8G内存,辅控制板为ARM架构
|
|
机器人软件系统
|
主操作系统为LINUX,由ROS体系组成机器人各功能模块软件之间的通信和协作
|
|
图像识别AI算法
|
采用机器视觉AI识别算法, 实现人脸识别、仪表识别、指示灯状态识别等
|
|
远程控制网路架构
|
采用WIFI或4G、5G无线通信架构连接,可工作在局域网或广域网场合
|
|
客户端监控软件
|
提供客户端监控软件DEMO源码,操作系统为WIN7或以上,可供SDK供客户二次开发
|
|
机器人运动指标
|
巡航速度0.2~1.0米/秒可选,最大爬坡角度为10度,最小转弯半径为0.35米
|
|
摄像头云台运动
|
水平旋转角-180~+180度,俯仰旋转角-50~+80度,光学摄像头和红外摄像头同步
|
|
机器人运动避障
|
依靠激光雷达扫描、超声波探测、机械防撞开关三重避障机制,确保机器人安全行走
|
|
内置电池规格
|
MR9巡检机器人的标配内置电池为24V/14AH磷酸铁锂电池组
|
|
机器人自动充电
|
任务结束后机器人会自动返回充电桩进行电力补充,无需人员干预。7X24小时工作
|
|
连续最大行走距离
|
对于充满电的机器人,可连续行走5000M(0.3米/秒的典型巡航速度)
|
|
MR9外形结构图示
|

|
|
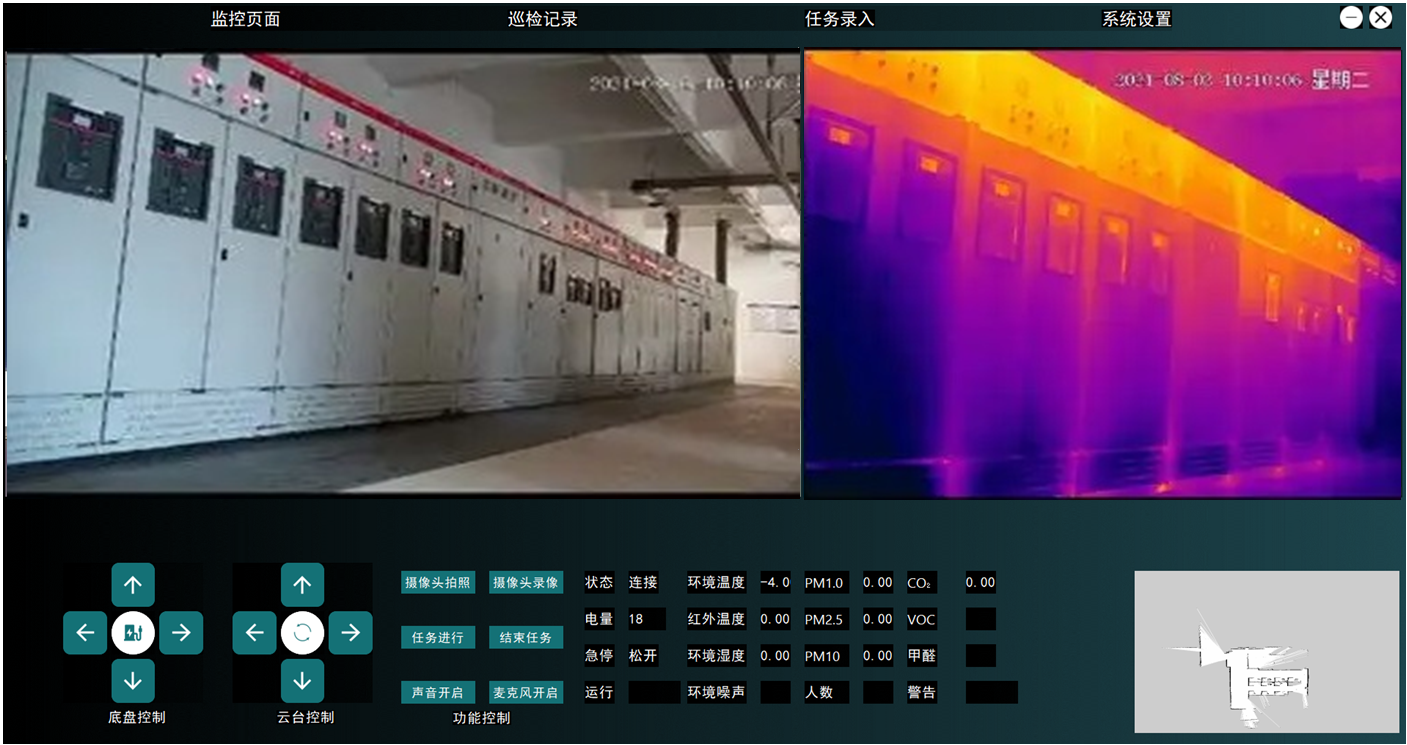
客户端监控页面
|
|




